DriveDreamer4D是一种先进的框架,旨在提升自动驾驶场景的4D重建质量。通过利用世界模型的先验知识,该框架能够基于真实世界驾驶数据合成新的视频轨迹,确保前景和背景元素在时空上具有一致性,并严格遵循交通规则。DriveDreamer4D是首个利用视频生成模型来改善驾驶场景中4D重建的系统,从而显著提升复杂场景及新轨迹视点下的渲染效果。
DriveDreamer4D是什么
DriveDreamer4D是提升自动驾驶场景4D重建质量的创新框架,它基于世界模型的先验知识来增强4D驾驶场景的表达能力。此框架能够利用真实的驾驶数据合成新的视频轨迹,并通过明确的结构化条件来控制前景和背景元素的时空一致性,确保生成的数据遵循交通规则。作为首个基于视频生成模型改善驾驶场景4D重建的框架,DriveDreamer4D显著提高了复杂场景和新轨迹视点下的渲染质量。
DriveDreamer4D的主要功能
- 4D场景重建:DriveDreamer4D能够重建复杂的动态驾驶环境,提供详细的4D(3D空间+时间)驾驶场景表示。
- 新轨迹视频合成:利用世界模型作为数据生成引擎,基于真实驾驶数据合成新的轨迹视频,丰富训练数据集。
- 时空一致性控制:通过结构化条件控制前景与背景元素的时空一致性,确保合成数据符合交通规范和复杂的动态驾驶环境。
- 提升渲染质量:在新的轨迹视点下显著提高渲染质量,尤其在如变道、加速和减速等复杂操作场景中。
- 增强数据多样性:自动生成包含复杂机动的新轨迹视频,增加数据多样性,提升端到端自动驾驶系统的评估效果。
- 闭环仿真支持:为需要高保真重建动态驾驶场景的闭环仿真提供强有力的基础。
DriveDreamer4D的技术原理
- 世界模型集成:DriveDreamer4D将自动驾驶的世界模型整合进系统,利用模型作为生成引擎合成新的视频轨迹数据。
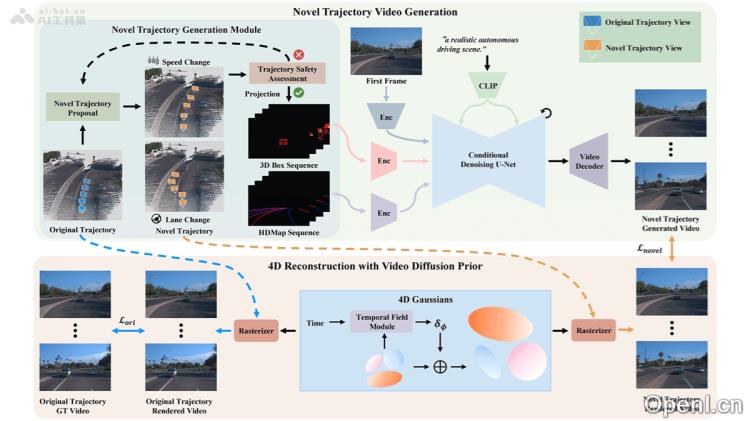
- 新轨迹生成模块(NTGM):提出NTGM模块,自动生成多样化的结构化交通条件,使DriveDreamer4D能够生产包含复杂机动的新轨迹视频。
- 时空约束同步:通过车辆操作同步视图投影,确保合成数据严格遵循4D驾驶场景的时空约束。
- 4D高斯表示:采用4D高斯表示(4DGS)模拟驾驶场景,每个高斯成分由中心位置、不透明度、协方差矩阵和视图依赖的RGB颜色控制。
- 可微分渲染:使用可微分高斯绘制渲染器将4D高斯投影到相机坐标系,计算每个像素的颜色。
DriveDreamer4D的项目地址
- 项目官网:drivedreamer4d.github.io
- GitHub仓库:https://github.com/GigaAI-research/DriveDreamer4D
- arXiv技术论文:https://arxiv.org/pdf/2410.13571
DriveDreamer4D的应用场景
- 自动驾驶系统开发:用于开发和测试自动驾驶车辆的端到端规划算法,通过模拟真实复杂驾驶场景来评估算法性能。
- 闭环仿真测试:在闭环仿真环境中,模拟各种驾驶操作和交通情形,测试自动驾驶车辆的反应和处理能力。
- 数据集增强:利用合成新轨迹视频来扩充和丰富训练数据集,提高自动驾驶系统对多样化场景的适应性和鲁棒性。
- 复杂机动操作模拟:模拟变道、加速、减速等复杂驾驶操作,为自动驾驶系统提供更全面的测试环境。
- 传感器数据模拟:模拟各种传感器数据,如摄像头、雷达和激光雷达数据,应用于自动驾驶系统的传感器融合和处理。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...

 粤公网安备 44011502001135号
粤公网安备 44011502001135号