AIGC动态欢迎阅读
内容摘要:
UniDoorManip团队 投稿量子位 | 公众号 QbitAI搜集了328×204条数据,只为让机器人把开门这一件事做到极致。
这是来自北大董豪团队和北邮何召锋团队的新研究。
做到了开箱即用,不需要在现实世界重新微调,就能操控房门、车门等各种能想到的门。
无论是普通的圆形的门把手;
还是需要钥匙才能打开的储物柜;
甚至是开保险柜,对它来说都不在话下。
目前项目主页和论文都已上线,数据集和仿真环境的代码也已经开源。
所以,这个专门开门的机器人框架,都有什么厉害的地方呢?
开门任务新SOTA这个框架名为UniDoorManip,集成了庞大的仿真数据集,并对真实世界的门操作机制进行有效的模拟。
与之前CMU的开门策略相比,该框架首次提出了一套规模与多样性兼具的仿真环境门类物体数据集。
通过收集大规模仿真数据实现对门类物体的操作,UniDoorManip利用门机制的特点训练出了跨类别的统一的开门策略。
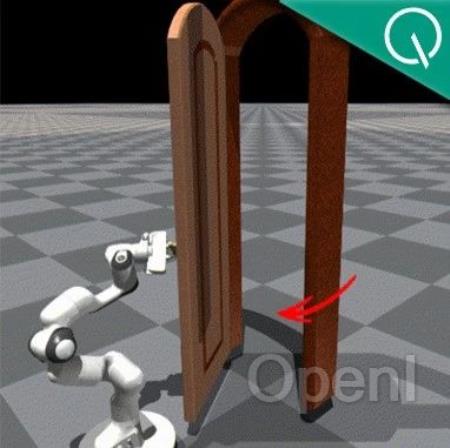
为了测评机器人的实际表现,作者在最具挑战性的拉门任务上进行了实验。
之所以说最具有挑战性,是因为机器人需要在机械臂夹爪一直抓住把手不脱落的同时,保证机械臂自身的姿态以及底座的移动不影响开门的
原文链接:北大北邮的门,机器人开
联系作者
文章来源:量子位
作者微信:QbitAI
作者简介:追踪人工智能新趋势,关注科技行业新突破
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。