通过设计正交磁化的Halbach阵列实现三维力的自解耦
原标题:低成本机器人“皮肤”登上Nature子刊:实现三维力的自解耦,来自法国国家科学研究中心&香港大学
文章来源:量子位
内容字数:4244字
柔性触觉传感器的创新研究
触觉是人类与外部环境互动的重要感知形式。科学家们正在研发柔性皮肤,以赋予机器人更灵巧的操作能力。近期,来自法国国家科学研究中心(CNRS)和香港大学的研究团队提出了一种新型柔性触觉传感器,旨在实现三维力的自解耦,简化结构与标定过程。
研究背景与挑战
现有的柔性触觉传感器在结构和制造上较为复杂,需要大量的校准,限制了其广泛应用。传统传感器通常基于压阻或电容技术,这些技术在实现三维力解耦方面面临巨大挑战。为此,研究者们开发了一种基于正交磁化Halbach阵列的柔性磁膜传感器,能够有效降低标定复杂度。
自解耦三维触觉传感器的原理
该传感器的主要结构包括柔性磁膜、弹性硅胶和PCB电路板(配备霍尔传感器)。在外力作用下,磁膜变形导致霍尔传感器测得的磁场信息变化,经过解耦算法可转换为三维力信息。研究表明,通过正交叠加的Halbach阵列,可以实现三维力的自解耦,显著简化了传感器的结构与标定流程。
应用实例
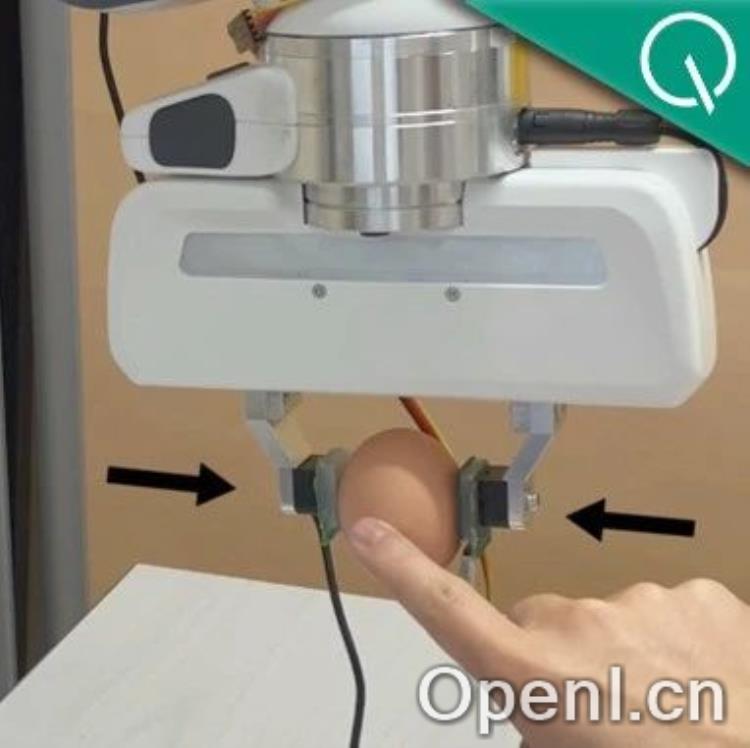
研究团队设计了不同形状和灵敏度的传感器,用于多个实际应用。首先,他们测量人工膝关节的三维力分布,实验结果显示传感器能实时提供准确的力分布数据。其次,研究人员将触觉传感器应用于机器人制作咖啡的过程中,通过直接与传感器交互实现了更直观的示教方式,无需传统的示教按钮。
未来的应用前景
研究者还展示了柔性PCB基底的传感器在健康监测领域的潜在应用,如监测膝盖支架与腿部的接触力。该研究为低成本的三维力触觉传感提供了新的思路,未来可望与视觉反馈和AI算法结合,进一步提升机器人智能化水平。
相关研究成果已发表在《Nature Machine Intelligence》上,展示了该传感技术在多个领域的广泛应用潜力。
联系作者
文章来源:量子位
作者微信:
作者简介:追踪人工智能新趋势,关注科技行业新突破
相关文章



全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。