涵盖1120个子步骤
原标题:空间智能新进展:教机器人组装宜家家具,首次实现操作步骤与真实视频对齐 | NeurIPS
文章来源:量子位
内容字数:5668字
斯坦福团队发布IKEA Video Manuals数据集,助力机器人家具组装
斯坦福大学的吴佳俊教授团队近期开发了一套名为IKEA Video Manuals的大型多模态数据集,旨在帮助机器人学习如何组装宜家家具。这一数据集已被NeurIPS会议接收,标志着机器人在空间智能领域的一个重要进展。
数据集概述
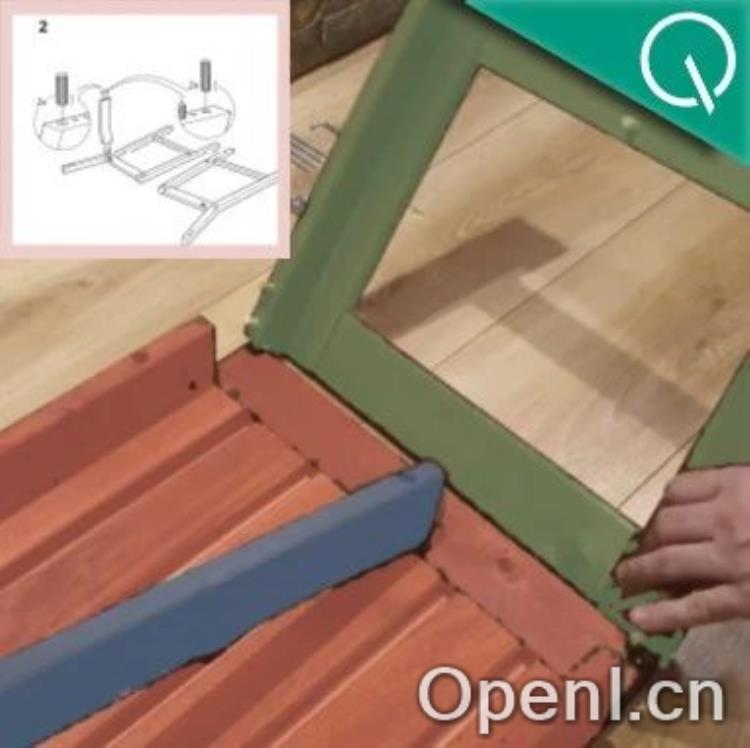
IKEA Video Manuals数据集涵盖了6大类宜家家具,共36种不同类型,每种家具均配有完整的3D模型、组装说明书和实际组装视频。数据集细分为1120个具体子步骤,详细描述了组装过程,并通过6D Pose追踪技术记录了每个部件的空间轨迹。
时空信息的精细标注
该数据集基于两个已有的数据集(IKEA-Manual和IKEA Assembly in the Wild)构建,涵盖了90多个不同环境下的真实组装视频,反映了家具组装的多样性。研究团队建立了一套可靠的标注系统,以应对遮挡、相似部件识别和摄像机等挑战。
核心任务与评估
为了评估当前AI系统在家具组装和空间推理方面的能力,团队设计了多个核心任务,其中包括基于3D模型的分割与姿态估计、视频目标分割和基于视频的形状组装。实验结果显示,现有AI模型在真实场景中的视频理解能力和空间推理能力仍存在不足。
研究意义与未来展望
该项目的第一作者刘雨浓表示,这项工作将组装规划从2D提升到了3D空间,解决了空间智能研究中的关键瓶颈。随着数据集的发布,机器人将能够更好地理解和执行家具组装任务,为未来的自动化家居提供了重要基础。
更多信息请参考项目主页和相关论文链接。
联系作者
文章来源:量子位
作者微信:
作者简介:追踪人工智能新趋势,关注科技行业新突破
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。