支持广泛的机器人系统应用。
原标题:重塑跨智能体灵巧手抓取,NUS邵林团队提出全新交互式表征,斩获CoRL Workshop最佳机器人论文奖
文章来源:机器之心
内容字数:6893字
灵巧抓取的新突破:D(R,O) Grasp 方法
近年来,灵巧抓取作为机器人操作领域的一个核心挑战,吸引了越来越多的研究关注。新加坡国立大学的邵林团队在此领域取得了新进展,提出了一种名为 D(R,O) Grasp 的统一表示方法,旨在解决灵巧手与物体之间复杂的交互关系,进而实现跨智能体灵巧抓取的高效与鲁棒。
1. 研究背景
灵巧抓取要求机器人手能够与各种形状的物体实现精确而稳定的交互。然而,现有的抓取策略通常需要为不同的机器人手型和物体形状单独优化,导致泛化能力不足。为了克服这一问题,邵林团队提出 D(R,O) Grasp 方法,通过交互中心的统一表示,提升了灵巧抓取的效率和鲁棒性。
2. D(R,O) Grasp 方法概述
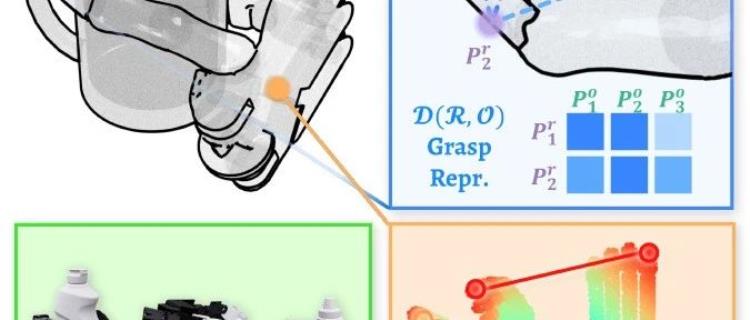
D(R,O) Grasp 方法主要包含三个部分:基于对比学习的配置不变预训练、D(R,O) 表征预测以及基于 D(R,O) 表征的抓取姿态生成。该方法通过捕捉机器人手与物体之间的空间关系,实现在不同手型与物体几何形状之间的广泛泛化。
3. 关键技术
首先,配置不变的预训练通过对齐不同配置下的几何特征,提升了模型的泛化能力。接着,D(R,O) 表征作为相对距离矩阵,允许在多种机器人手型与物体之间建立联系。最后,基于 D(R,O) 表征的抓取姿态生成,采用多点定位技术高效计算机器人手点云,优化过程简单迅速。
4. 实验结果与应用
实验结果显示,该方法在抓取成功率、姿态多样性和生成效率等方面均显著优于现有技术。尤其是在真实机器人实验中,D(R,O) Grasp 方法在 10 个全新物体上的成功率达到了 89%。
5. 结论
通过 D(R,O) Grasp 方法,邵林团队为灵巧抓取提供了新的解决方案,展示了良好的泛化能力和高效性。该研究不仅推动了机器人抓取技术的发展,也为未来更广泛的机器人系统应用奠定了基础。
联系作者
文章来源:机器之心
作者微信:
作者简介:专业的人工智能媒体和产业服务平台
相关文章



全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。