ASAP – 卡内基梅隆大合英伟达推出的模拟与真实物理对齐框架
ASAP(Aligning Simulation and Real Physics)是由卡内基梅隆大学与英伟达联合开发的一种创新框架,旨在解决仿人机器人在模拟与现实环境中动力学不匹配的问题。该框架包括两个主要阶段:预训练和后训练。通过在模拟环境中学习策略,并利用人类数据生成目标动作,ASAP能够有效地提高仿人机器人的灵活性和协调性,降低跟踪的误差,从而实现从虚拟环境到现实世界的高效技能迁移。
ASAP是什么
ASAP(Aligning Simulation and Real Physics)是卡内基梅隆大学与英伟达联合推出的一种两阶段框架,旨在解决仿人机器人在模拟与现实动力学不一致的问题。该框架首先在模拟环境中预训练跟踪策略,通过使用人类数据生成目标动作。随后在后训练阶段,ASAP收集真实世界的数据,训练Delta动作模型以补偿模拟与现实之间的动力学差异,并通过微调策略使其适应真实物理环境。这一框架显著提升了仿人机器人在复杂动作中的敏捷性和全身协调能力,降低了跟踪误差,为开发更灵活、表现力更强的仿人机器人开辟了新的技术路径。
ASAP的主要功能
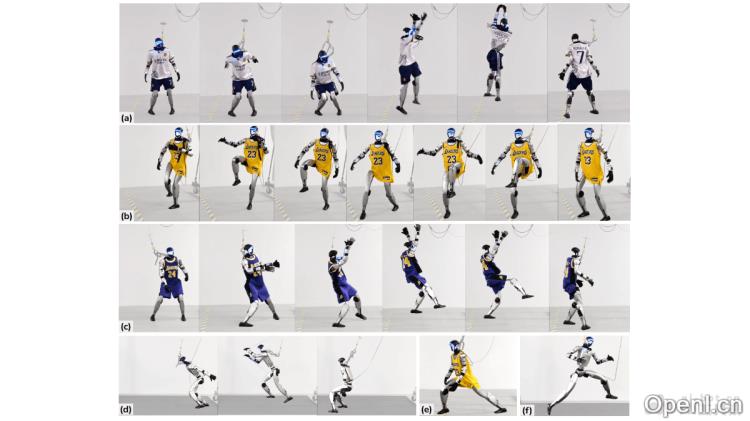
- 高效的全身技能迁移:将模拟环境中训练的控制策略顺利迁移到实际机器人上,使其能够执行复杂的全身动作,如跳跃、平衡和快速转身等。
- 动力学补偿与适应能力:通过学习Delta动作模型,自动调整模拟与现实之间的动力学差异,包括硬件特性、摩擦力和惯性参数,从而让机器人在真实环境中实现与模拟中相似的表现。
- 提升跟踪精度:显著减少机器人在执行任务时的跟踪误差,提升动作的准确性与稳定性,让其在复杂动态任务中保持良好的性能。
- 增强泛化能力:框架不仅适用于特定的预训练,还能有效适应未见过的动作(即“超出分布”),提高机器人在真实环境中的泛化能力。
ASAP的技术原理
- 预训练阶段(Pre-training):
- 数据生成:从人类视频提取动作数据,并将其重新映射到机器人模型,生成用于训练的数据集。
- 跟踪策略训练:在模拟环境中应用强化学习(Reinforcement Learning, RL)来训练跟踪策略,使机器人能够有效跟踪预设的动作轨迹。该策略基于时间相位变量训练,以适应不同长度的动作序列。
- 后训练阶段(Post-training):
- 真实世界数据收集:将预训练的策略应用到实际机器人上,收集在执行任务时的关节位置、速度和加速度等数据。
- Delta动作模型训练:根据收集到的真实世界数据,训练Delta动作模型,旨在最小化模拟状态与真实状态之间的差距,从而学习如何补偿动力学不匹配。具体来说,该模型输出“修正动作”(delta action),以调整原始动作,从而优化模拟环境的动力学特性。
- 策略微调:将训练好的Delta动作模型集成到模拟器中,并对预训练的跟踪策略进行微调。基于修正后的模拟环境继续进行训练,使策略更好地适应真实世界的物理特性,提升在实际机器人上的表现。
ASAP的项目地址
- 项目官网:https://agile.human2humanoid.com/
- GitHub仓库:https://github.com/LeCAR-Lab/ASAP
- arXiv技术论文:https://arxiv.org/pdf/2502.01143
ASAP的应用场景
- 体育与表演领域:机器人可以模拟员的动作,用于体育训练、动作分析和表演,提升视觉效果。
- 灾难救援:机器人能够执行敏捷的动作,迅速到达危险区域进行救援,提高救援效率。
- 工业制造:机器人能够适应复杂的工业任务,提升生产效率和灵活性,减少错误。
- 家庭服务:机器人可协助完成日常家务,为老人或残疾人提供便利和安全支持。
- 虚拟现实与游戏:生成逼真的虚拟角色动作,增强游戏的沉浸感,提高开发效率。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。