GaussianCity – 南洋理工大学 S-Lab 团队推出的 3D 城市生成框架
GaussianCity是什么
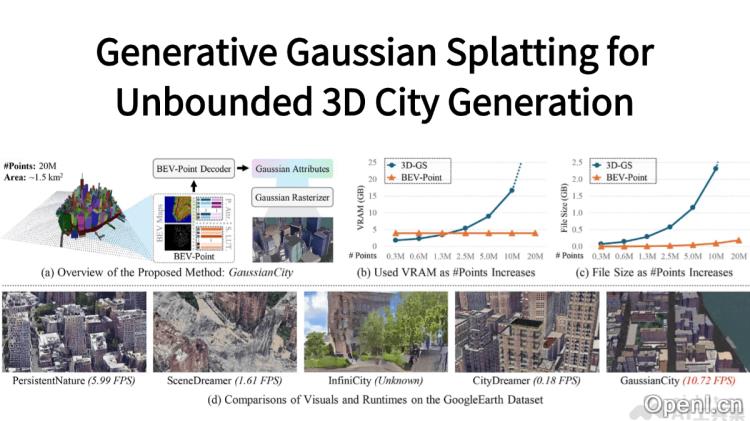
GaussianCity 是由南洋理工大学 S-Lab 团队开发的一款高效、无边界的3D城市生成框架,基于先进的3D高斯绘制(3D-GS)技术。该框架采用了紧凑的 BEV-Point 表示方法,确保在生成大规模场景时显存(VRAM)使用量保持在稳定水平,从而有效解决了传统方法在显存和存储需求上的瓶颈。GaussianCity 还引入了空间感知的 BEV-Point Decoder,利用点序列化器和点变换器来捕捉BEV点的结构与上下文特征,最终生成高质量的3D高斯属性。在无人机和街景视角的3D城市生成任务中,GaussianCity展现出了卓越的性能,相比于现有技术(如CityDreamer),其速度提升高达60倍,在生成效果和效率上都达到了新的高度。
GaussianCity的主要功能
- 高效生成大规模3D城市:能够快速创建逼真且无边界的城市环境,支持从无人机视角到街景视角的各类场景。
- 低显存和存储需求:通过紧凑的 BEV-Point 表示方法,确保显存和存储需求保持在较低水平,克服了传统方法在大规模场景生成中的显存瓶颈问题。
- 高质量视觉效果:利用空间感知的 BEV-Point Decoder,生成高细节和真实感的3D城市,支持风格化编辑和局部修改。
- 实时渲染与交互:支持实时渲染及用户交互,能够迅速生成高质量的3D城市图像,适合游戏、动画、虚拟现实等多种应用。
GaussianCity的技术原理
- 3D高斯绘制(3D-GS):通过3D高斯分布来表示场景中的物体和结构,利用GPU加速渲染,实现高效的3D场景生成。
- BEV-Point 表示:将3D场景中的点信息分解为位置和风格属性,结合鸟瞰图(BEV)和风格查找表进行压缩,确保显存使用量不会随着场景规模的增长而增加。
- 空间感知的BEV-Point解码器:通过点序列化器和点变换器,捕捉BEV点的结构及上下文信息,生成3D高斯属性,实现高质量的3D场景渲染。
- 高效的渲染流程:结合位置编码器和调制MLP,生成3D高斯属性,通过高斯光栅化器将属性渲染为最终图像。
GaussianCity的项目地址
- GitHub仓库:https://github.com/hzxie/GaussianCity
- HuggingFace模型库:https://huggingface.co/spaces/hzxie/gaussian-city
- arXiv技术论文:https://arxiv.org/pdf/2406.06526
GaussianCity的应用场景
- 游戏与虚拟现实(VR):迅速生成生动的虚拟城市,支持实时渲染与交互,从而降低开发成本和时间。
- 动画与影视制作:高效构建复杂城市场景,支持风格化渲染,显著提升制作效率。
- 城市规划与建筑设计:快速生成城市布局和建筑背景,辅助可视化规划与设计。
- 自动驾驶与交通模拟:创建逼真的交通场景,用于算法测试和交通流量分析。
- 地理信息系统(GIS):将地理数据快速转化为3D可视化场景,支持城市建模与分析。
常见问题
- GaussianCity适合哪些行业使用? GaussianCity广泛适用于游戏开发、虚拟现实、影视制作、城市规划等多个行业。
- 如何访问GaussianCity的源代码? 您可以通过访问其GitHub仓库获取GaussianCity的源代码和相关文档。
- GaussianCity的性能如何? GaussianCity在大规模场景生成上表现出色,速度相较于现有技术提升了60倍。
- 能否实时生成3D城市? 是的,GaussianCity支持实时渲染,能够快速生成高质量的3D城市图像。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。