AIGC动态欢迎阅读
原标题:李飞飞团队提出ReKep,让机器人具备空间智能,还能整合GPT-4o
关键字:报告,关键,阶段,任务,目标
文章来源:机器之心
内容字数:0字
内容摘要:
机器之心报道
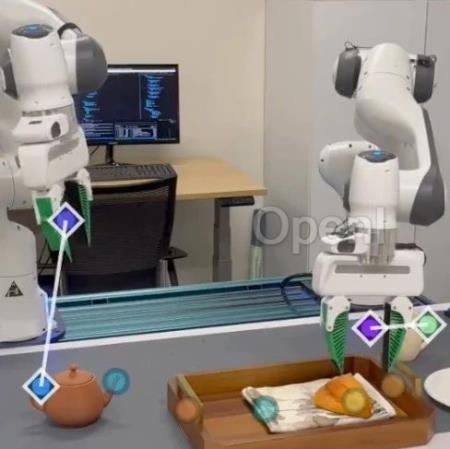
编辑:Panda视觉与机器人学习的深度融合。当两只机器手丝滑地互相合作叠衣服、倒茶、将鞋子打包时,加上最近老上头条的 1X 人形机器人 NEO,你可能会产生一种感觉:我们似乎开始进入机器人时代了。事实上,这些丝滑动作正是先进机器人技术 + 精妙框架设计 + 多模态大模型的产物。
我们知道,有用的机器人往往需要与环境进行复杂精妙的交互,而环境则可被表示成空间域和时间域上的约束。
举个例子,如果要让机器人倒茶,那么机器人首先需要抓住茶壶手柄并使之保持直立,不泼洒出茶水,然后平稳移动,一直到让壶口与杯口对齐,之后以一定角度倾斜茶壶。这里,约束条件不仅包含中间目标(如对齐壶口与杯口),还包括过渡状态(如保持茶壶直立);它们共同决定了机器人相对于环境的动作的空间、时间和其它组合要求。
然而,现实世界纷繁复杂,如何构建这些约束是一个极具挑战性的问题。
近日,李飞飞团队在这一研究方向取得了一个突破,提出了关系关键点约束(ReKep/Relational Keypoint Constraints)。简单来说,该方法就是将任务表示成一个关系关键点序列。并且,这套框架还能很好地与 GPT-4
原文链接:李飞飞团队提出ReKep,让机器人具备空间智能,还能整合GPT-4o
联系作者
文章来源:机器之心
作者微信:
作者简介:
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。