能在2D物理环境中执行多样化任务了
1. 研究背景与目标
在机器学习领域,开发能够在未见过领域表现出色的通用智能体一直是长期目标之一。牛津大学的研究者们提出了Kinetix框架,旨在通过开放式物理控制任务训练通用智能体,推动其在2D物理环境中的应用。
2. Kinetix框架的特点
Kinetix框架覆盖范围广泛,可以表征多种任务,包括机器人抓取、经典RL环境(如Cartpole、Acrobot)、电子游戏等。为了支持Kinetix,研究者们开发了基于JAX的物理引擎Jax2D,能够高效模拟数十亿次环境交互。通过随机采样Kinetix环境,几乎可以无限生成多样化的训练任务。
3. 动作与观察空间
Kinetix支持多离散和连续动作空间,并使用符号观察表示每个实体的物理属性。该观察空间使环境完全可观察,允许智能体在没有记忆的情况下进行策略学习,并且支持基于像素的观察选项。
4. 奖励机制与环境生成
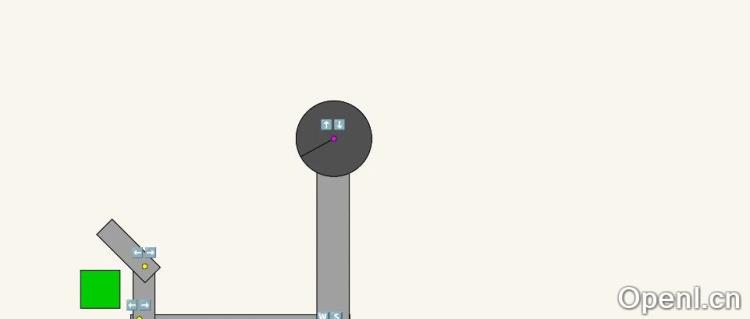
研究中选择了简单而表达力强的奖励函数,使绿色和蓝色形状发生碰撞时获得+1奖励,碰撞红色形状则获得-1奖励。此外,研究者提供了随机级别生成器,以确保环境的多样性并减少简并情况的出现。
5. 实验结果与智能体性能
研究者在Kinetix环境中训练的RL智能体表现出对一般机械特性的理解,并能够零样本解决未见过的手工环境。微调过程中,通用智能体的性能显著提升,尤其在特定困难环境中,微调智能体能减少学习所需样本数量,并解决专门训练过的智能体无法完成的任务。
6. 总结与展望
Kinetix的表现力和多样性使其成为研究开放性、通用智能体和终身学习的理想环境。未来的研究可以进一步探索Kinetix的潜力,以推动通用智能体在更广泛和复杂环境中的应用。
联系作者
文章来源:机器之心
作者微信:
作者简介:专业的人工智能媒体和产业服务平台
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。