EMMA-X是一款由新加坡科技设计大学开发的具身多模态动作模型,拥有70亿参数,旨在提升机器人在复杂环境中的任务执行能力。该模型基于有根据的链式思维(CoT)推理数据,对OpenVLA进行了微调,结合了层次化的具身数据集,包含3D空间、2D夹爪位置以及有根据的推理。EMMA-X特别推出了一种创新的轨迹分割策略,通过分析夹爪的开合状态和机器人手臂的轨迹,极大地增强了任务推理和前瞻性空间推理的能力,在实际机器人任务中表现出色,尤其是在需要空间推理的场景。
EMMA-X是什么
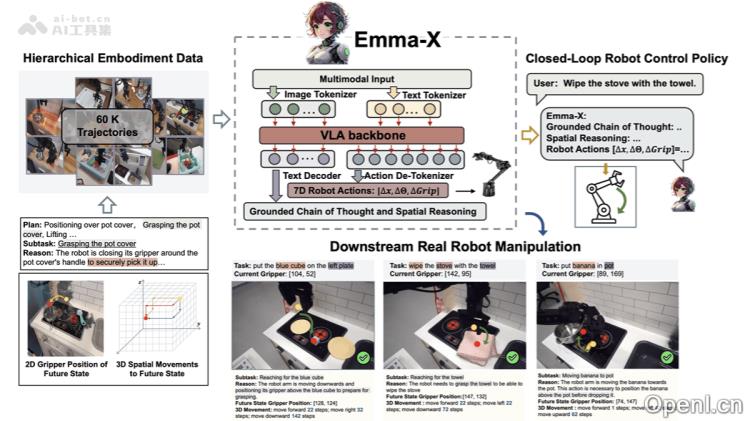
EMMA-X是新加坡科技设计大学推出的一款具身多模态动作模型,具备70亿参数,旨在通过有根据的链式思维(CoT)推理数据对OpenVLA进行微调。它融合了层次化的具身数据集,包括3D空间、2D夹爪位置和依据的推理,并引入了一种创新的轨迹分割策略,利用夹爪的开合状态和机械臂的轨迹来增强任务推理与前瞻性空间推理。这种模型在真实世界的机器人任务中,尤其是那些需要空间推理的任务上,展现了显著的性能优势。
EMMA-X的主要功能
- 提升空间推理能力:通过预测夹爪的未来2D位置和3D计划,优化机器人在长期任务中的规划能力。
- 具体化任务规划:模型结合视觉与任务推理,生成适应环境的行动策略,提升机器人完成复杂任务的能力。
- 轨迹分割:通过夹爪状态和机械臂轨迹,将操作序列分割成语义相似的动作段,增强任务理解和规划。
- 减少误差与幻觉问题:结合视觉图像和任务推理,降低任务推理过程中的误差和幻觉现象。
- 层次化规划数据生成:为每个操作段生成2D夹爪位置和3D空间信息,支持机器人的决策过程。
EMMA-X的技术原理
- 层次化具身数据集:基于BridgeV2数据集构建,包含60,000条机器人操作轨迹,并附有详细的空间推理和任务推理信息。
- 前瞻性空间推理:模型能够预测夹爪的未来位置和计划,指导机器人即时动作与长期目标的对齐。
- 轨迹分割策略:利用HDBSCAN算法和自定义的距离度量方法,结合末端执行器的轨迹和夹爪状态,动态分割操作序列。
- Gemini生成任务推理:通过Gemini模型为每个分段生成子任务和具体化推理,提高任务理解的准确性。
- EMMA-X架构:基于OpenVLA的调整,链式思维训练增强空间推理和场景理解能力,预测下一步机器人的行动策略。
EMMA-X的项目地址
- GitHub仓库:https://github.com/declare-lab/Emma-X
- HuggingFace模型库:https://huggingface.co/declare-lab/Emma-X
- arXiv技术论文:https://arxiv.org/pdf/2412.11974
EMMA-X的应用场景
- 制造业自动化:在组装、包装和质量控制等任务中,提升生产线的效率与灵活性。
- 物流与仓储:帮助机器人在仓库中进行货物拣选、搬运和分类,优化存储空间和物流流程。
- 服务行业:在餐饮或酒店服务中,机器人能够完成复杂任务,如烹饪辅助、房间清洁和物品递送。
- 医疗辅助:在医疗领域中,机器人执行精细操作,例如手术辅助或实验室样本处理。
- 家庭自动化:家庭服务机器人可进行清洁、物品整理及其他日常家务,提高生活便利性。
常见问题
- EMMA-X适合哪些行业使用? EMMA-X适用于制造业、物流、服务业、医疗及家庭自动化等多个领域。
- 如何获取EMMA-X的相关资料? 用户可以通过其GitHub仓库和HuggingFace模型库获取EMMA-X的详细资料和代码。
- EMMA-X的主要优势是什么? EMMA-X通过结合多模态数据和创新的推理策略,显著提升机器人的任务执行能力和空间推理能力。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...


打开我,进入AI时代。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。
全面、高效的AI工具产品情报,发现和使用最酷的AI工具!
Ctrl + D 或 ⌘ + D 收藏本站到浏览器书签栏。